Bộ điều khiển động cơ bước
Hiện nay, bộ động cơ bước được áp dụng nhiều trong việc tinh chỉnh và điều khiển robot bắt, bám các mục tiêu trong các khí tài quan ngay cạnh hay điều khiển lập trình trong số thiết bị tối ưu cắt gọt,… Vậy, điều khiển động cơ bước tất cả khó không? làm sao cho hiệu quả?
1. Tư tưởng motor bước
Trước khi mày mò cách tinh chỉnh động cơ cách hiệu quả, bạn cần nắm được hộp động cơ bước là gì? Đây là một động cơ đồng bộ dùng tất cả khả năng thay đổi các tín hiệu điều khiển động cơ bên dưới dạng các xung năng lượng điện rời rạc sau đó nhau để biến hóa các hoạt động của góc tảo hoặc các vận động của roto và đưa về khả năng thắt chặt và cố định roto vào trong số những vị trí cần thiết.
Bạn đang xem: Bộ điều khiển động cơ bước
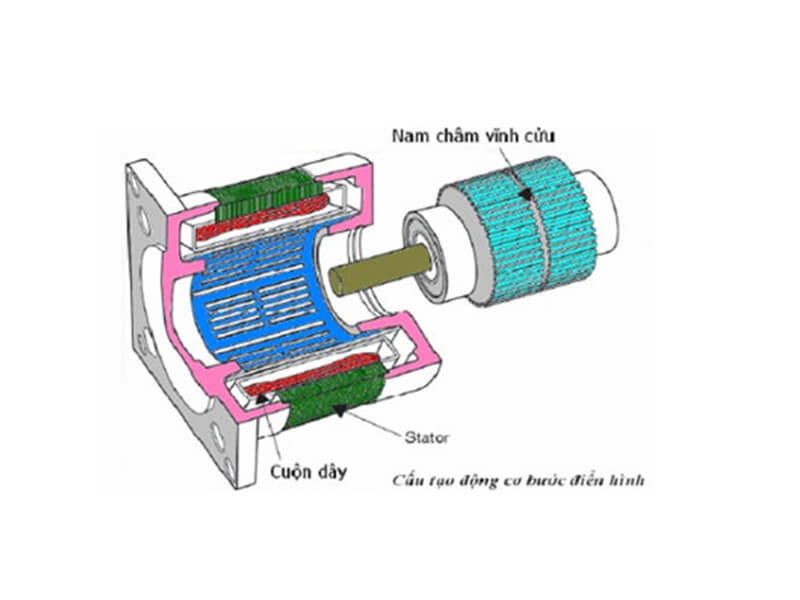
Động cơ bước là 1 trong loại bộ động cơ đồng bộ
Động cơ bước là một trong những loại động cơ điện gồm nguyên lý vận động và ứng dụng khác hoàn toàn với đại đa phần các loại bộ động cơ điện còn lại. Bọn chúng thực chất chính là một bộ động cơ đồng bộ, được dùng để chuyển đổi các tín hiệu tinh chỉnh và điều khiển động cơ bên dưới dạng các xung điện.
2. Nguyên tắc tinh chỉnh và điều khiển động cơ bước
Khác với những động cơ đồng nhất thông thường, trong việc điều khiển và tinh chỉnh vi bước step motor Rotor, bộ động cơ bước được khởi động bằng phương thức đo tần số vì nó không tồn tại cuộn dây nhằm khởi động. Rotor của động cơ bước sẽ có được loại Rotor tích cực và lành mạnh hoặc là Rotor thụ động.
Động cơ bước sẽ làm việc phụ thuộc bộ gửi mạch năng lượng điện tử nhằm mục đích mục đích đưa các tín hiệu vào trong Stator theo một sản phẩm công nghệ tự cùng 1 tần số tốt nhất định. Tần số chuyển mạch của đụng cơ sẽ được tính bằng tổng số góc tảo của Rotor. Khi đó, chiều quay tương tự như tốc độ cù của roto sẽ phụ thuộc vào vào máy tự cùng tần số chuyển đổi.
Động cơ bước thao tác nhờ vào bộ chuyển mạch điện tử
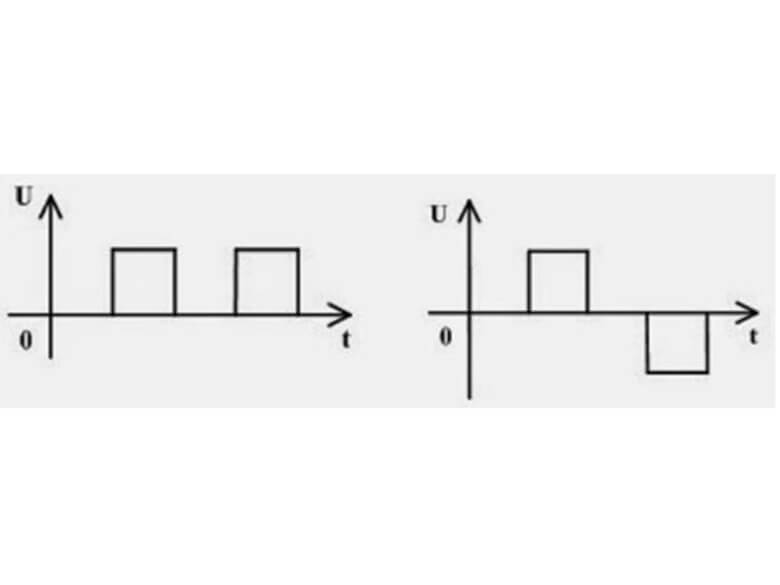
Xung năng lượng điện áp được cấp cho cho cuộn dây Stator hôm nay có thể là xung 1 rất hoặc 2 cực:
Chuyển mạch điện tử trong điều khiển step motor rất có thể cung cấp cho điện áp điều khiển cho các cuộn dây stator hoàn toàn có thể theo từng cuộn trơ trẽn hoặc là theo từng nhóm của các cuộn dây.Trị số của đụng cơ tương tự như chiều của lực năng lượng điện từ đó là tổng F dựa vào vào vị trí của các lực năng lượng điện từ tất cả trong nó. Bởi đó, địa chỉ Rotor của hộp động cơ bước hôm nay sẽ dựa vào hoàn toàn vào cách thức cung cấp cho điện cho những cuộn dây dưới đây: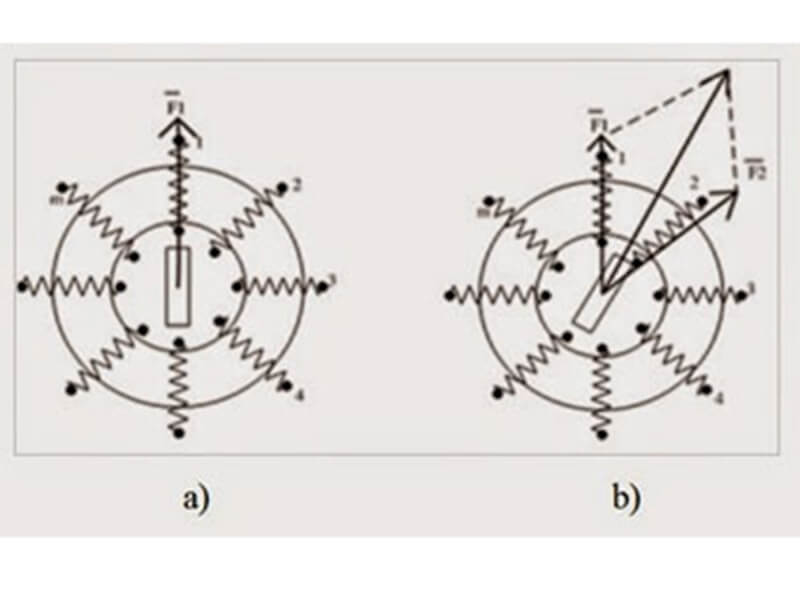
Sơ đồ chi tiết nguyên lý hoạt động vui chơi của động cơ bước
Hình trên biểu lộ nguyên lý hoạt động của động cơ cách m pha với Rotor bao gồm 2 rất 2p = 2 cùng khi bọn chúng không được kích thích. Nếu những cuộn dây bên phía trong của động cơ bước được cung ứng điện riêng biệt lẻbởi xung 1 rất thì Rotor của động cơ bước từ bây giờ sẽ bao gồm m vị trí định hình trùng với trục của những cuộn dây hệt như ở hình a.
Để mạch điều khiển và tinh chỉnh động cơ bước 6 dây bức tốc lực năng lượng điện từ tổng của Stato, từ này sẽ tăng trường đoản cú thông và mô men đồng bộ, bọn họ phải cấp cho điện đồng thời mang lại 2, 3, cũng có khi là nhiều cuộn dây. Thời gian đó phần Rotor của bộ động cơ bước sẽ có được vị trí ổn định và trùng cùng với vectơ của lực điện từ tổng F. Đồng thời, lực điện từ tổng F của nó cũng đều có giá trị lớn hơn lực điện từ phạt ra từ các cuộn dây Stator.
3. Sơ đồ với cách điều khiển và tinh chỉnh động cơ bước
Động cơ bước khi được điều khiển dưới dạng những xung năng lượng điện rời rạc tiếp đến nhau thì sẽ tạo thành các chuyển động góc quay cũng tương tự các vận động của Rotor. Động cơ bước sẽ không thể quay theo cơ chế thường thì mà sẽ quay theo từng bước nên cũng có chính sách chính xác không hề nhỏ xét về mặt tinh chỉnh và điều khiển học. Chúng làm việc nhờ vào những bộ gửi mạch điện tử đưa những tín hiệu điều khiển và tinh chỉnh động cơ cách 5 dây vào Stato theo thiết bị tự và hầu như tần số nhất định.
Vì mỗi một loại động cơ bước sẽ sở hữu những đặc tuyến đường khác nhau, yêu cầu cách điều khiển cũng trở nên khác nhau. Tùy thuộc vào khả năng kéo (mô men) và vận tốc quay mà hộp động cơ yêu cầu, chúng ta có thể dùng các cách điều khiển và tinh chỉnh dưới đây:
Với những hộp động cơ bước chỉ việc chạy ở tốc độ thấp: bạn ta đang sử dụng phương thức điều khiển để cung ứng điện áp trực tiếp. Thời gian này, bao gồm nội trở cuộn dây của bộ động cơ sẽ chuyển động để tạo ra một chiếc điện, vì chưng đó, giới hạn dòng năng lượng điện này sẽ phụ thuộc vào năng lượng điện áp cung ứng trực tiếp cho nó.Với những bộ động cơ bước yêu cầu chạy ở tốc độ cao: tín đồ ta ko thể liên tục sử dụng phương thức cấp năng lượng điện áp trực tiếp nữa bởi vì lực kéo từ bây giờ sẽ bị giảm nghiêm trọng. Bởi vì lẽ, đặc con đường cảm của cuộn dây trong hộp động cơ sẽ giam cầm khả năng hoạt động vui chơi của dòng điện.Với những bộ động cơ bước cần cải thiện và nâng cấp hiệu suất của motor bước và bộ điều khiển và tinh chỉnh ở tốc độ thấp và phải tăng tốc độ cao thì họ nên sử dụng phương thức điều khiển bởi băm xung. Cách tinh chỉnh động cơ cách này sẽ giúp bạn gia hạn tần số không đổi, tùy thuộc vào nguyên tắc duy trì dòng năng lượng điện thì những cuộn dây của hễ cơ cũng sẽ không thay đổi so với đa số cấp độ. Cách tinh chỉnh và điều khiển này còn gọi là điều khiển tùy thuộc vào dòng điện.4. Phương thức điều khiển bộ động cơ bước
4.1. Điều khiển bộ động cơ bước dạng sóng (Wave Drive)
Đây là phương thức cơ bạn dạng nhất để tinh chỉnh 1 hộp động cơ bước, dù cho nó ko được thực hiện nhiều cơ mà vẫn đáng sẽ giúp cho chúng ta hiểu về kiểu cách điều khiển bộ động cơ bước. Trong phương pháp này, nếu mỗi trộn hoặc stato ở cạnh nhau sẽ được động cơ kích hoạt lần lượt bằng phương pháp sử dụng 1 mạch đặc biệt giúp từ hóa với khử tự hóa stato, vấn đề đó sẽ dẫn đến hoạt động nhanh chóng của rôto một bước.
Xem thêm: Download Driver Máy In Brother Hl 1201, Download Driver Printer Brother Hl 1201
4.2. Điều khiển động cơ chạy đủ bước (Full Step Drive)
Trong mạch điều khiển động cơ bước 4 dây, thay bởi vì kích hoạt toàn bộ các stator một lần, 2 stator sẽ được kích hoạt chỉ cách nhau 1 khoảng thời hạn ngắn. Điều này tức là nếu stator thiết bị 1 nhảy ON thì stator thứ 2 sẽ ON ngay tiếp nối một khoảng thời gian ngắn, trong khi đó thì stator trước tiên vẫn ON. Phương pháp này dẫn đến mô men xoắn đạt tới cao và mang lại phép họ điều khiển bộ động cơ tải cao.
4.3. Điều khiển bộ động cơ chạy nửa cách (Half-Stepping Drive)
Phương pháp này cũng như như ổ đĩa Full bước. Ở step motor và mạch điều khiển, 2 stator được để cạnh nhau sẽ được tiến hành kích hoạt trước cùng stator đồ vật 3 sẽ được kích hoạt ngay lập tức sau đó, dẫu vậy 2 stator này lại bị loại bỏ hóa. Chu kỳ luân hồi này sẽ kích hoạt 2 stator trước và tiếp nối 1 stator lặp lại để giúp điều khiển động cơ bước. Phương pháp này đã dẫn đến bức tốc độ phân giải của cồn cơ trong những khi đó mô men xoắn sẽ giảm xuống.
4.4. Điều khiển động cơ chạy bước nhỏ tuổi (MicroStepping Drive)
Đây là phương thức điều khiển hộp động cơ bước được sử dụng phổ cập nhất vì chưng nó tất cả tính đúng mực rất cao. Mạch điều khiển cung cấp ngay 1 chiếc bước chuyển đổi cho cuộn dây stato sẽ tồn tại sống dạng sóng hình sin. Những bước đi nhỏ xíu này hiện thời dùng để tăng cường độ đúng mực tuyệt đối của mỗi bước một. Cách thức này cũng rất được sử dụng rộng thoải mái do nó rất có thể giảm ồn ào của chuyển động ở cường độ lớn.
Có nhiều phương pháp để tinh chỉnh động cơ bước
5. Điều khiển bộ động cơ bước dùng Code Arduino như vậy nào?
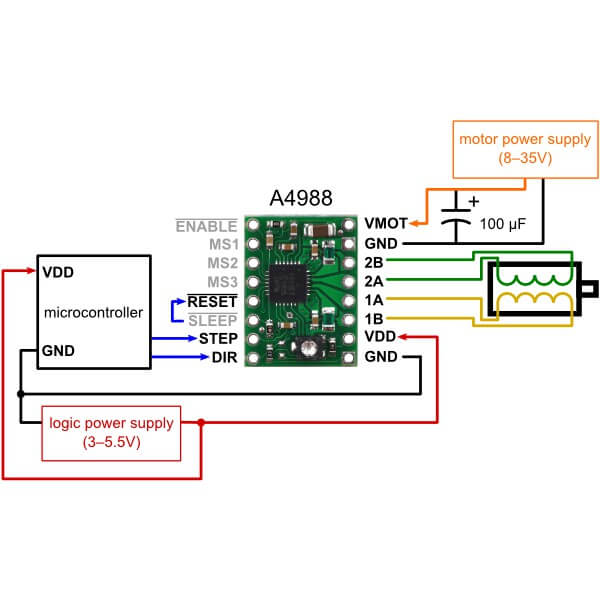
Module Driver A4988 là một trong con IC gồm trong thiết bị in 3d, 1 điểm khá ngạc nhiên là phần nhiều các sản phẩm công nghệ in 3 chiều đều áp dụng con IC này để điều khiển, vày máy in 3d có download trọng bé dại và size của bé IC đó lại khá tương thích, nó nhỏ hơn 10 lần đối với tb6560 hoặc 20 lần đối với MA860H. Thậm chí, nó chỉ to hơn móng tay bạn một chút.
Quá trình tinh chỉnh động cơ bước Arduino gồm tính năng:
Điều khiển rất đối kháng giản.Điều khiển được cả rất nhiều động cơ vận động với năng lượng điện áp vừa, thậm chí lên tới 35V và tất cả dòng lên đến mức 2A.Có 5 chế độ: full bước, 1/ 2 bước, 1/ 4 bước, 1/ 8 bước, 1/ 16 bước.Điều chỉnh dòng ra bằng phương pháp sử dụng phân tách áp (siêu nhỏ) nằm trên Current Limit = VREF × 2.5Tự động nhảy Shutdown thì vượt nóng,...Khi các bạn lựa chọn cơ chế full hay một nửa hoặc 1/4 thì đã được trải qua 3 sạc pin là MS1, MS2, MS3. Có thể nối thẳng 3 pin này vào công tắc nguồn bit 3p để dễ dàng dàng thiết lập từ bên trên phần cứng. Lưu ý thêm, trường hợp thả nổi 3 pin này thì tức là mode full step.
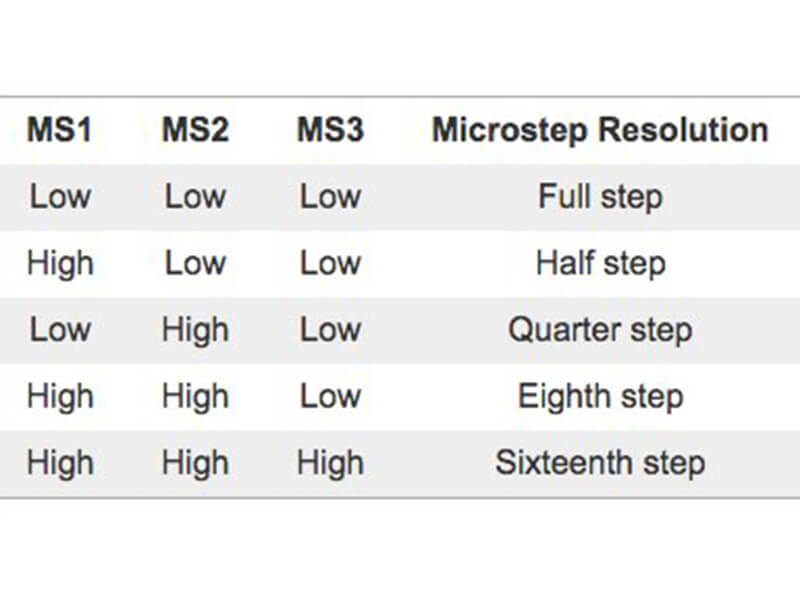
Bảng thông số kỹ thuật điều khiển động cơ bước Arduino
Nếu ý muốn bật/ tắt hộp động cơ thì các bạn phải trải qua pin ENABLE, bật mức LOW có nghĩa là bật module, nấc HIGH có nghĩa là đang tắt module. Điều khiển chiều quay mang lại động cơ có thể thông qua sạc pin DIR.
Thực hiện tại cách điều khiển và tinh chỉnh step motor trải qua pin STEP, chăm chú mỗi xung đã tương ứng với một bước (hoặc 1 vi bước). Nhị chân Sleep cùng rất Reset vẫn nối cùng nhau luôn. Sau đây là cụ thể cách điều khiển động cơ bước source code:
#include:
AccelStepper stepper (1,5,4); // sạc 5 step, sạc 4 dir void setup () Serial.begin (9600); pinMode (6,OUTPUT); // Enable; digital Write(6, LOW); // Đặt Enable xuống LOW để khởi đụng động cơ void loop() {if (stepper.distanceToGo() == 0)// chất vấn thử động cơ bước có còn đang hoạt động hay không, nếu không hề chạy thì chọn:
delay(1000); stepper.moveTo(rand() % 400); //chuyển cho tọa độ 0 399 (Random) stepper.setMaxSpeed((rand () % 400) 200); //chỉnh tốc độ. Stepper. Đặt setAcceleration((rand() % 200) 100); // chỉnh gia tốc
Serial.println(stepper.distanceToGo());
stepper.run (); //
Chú ý phải tất cả hàm này sinh sống hàm loop vì chưng với mỗi đổi mới stepper thì nên làm như vậy new chạy được.
Kết luận
Trong quy trình điều khiển hoạt động kỹ thuật, điều khiển và tinh chỉnh động cơ bước là một trong những cơ cấu chấp hành quan trọng hữu hiệu mang đến máy móc, bởi vì nó có thể thực hiện trung thành được các lệnh mà chúng ta đưa ra dưới dạng số. Cùng với sự trở nên tân tiến của ngành công nghệ chế tạo, bộ động cơ bước bây giờ được ứng dụng nhiều trong các ngành auto hóa, nhất là trong các thiết bị tinh chỉnh từ xa cần có độ đúng chuẩn cao.











